Simulationsbasierte stochastische Wirkungsanalyse
Das Spektrum potenziell sicherheitskritischer Situationen für automatisierte und vernetzte Fahrzeuge (AVF) - insbesondere solche, an denen schw?chere Verkehrsteilnehmer beteiligt sind - ist viel zu breit, um sie umfassend (in ?bereinstimmung mit ISO 26262) allein durch Fahren im Realverkehr oder in kontrollierten Laborumgebungen zu testen. Neben den technischen sind hier vor allem auch ethische Einschr?nkungen zu berücksichtigen. Diese und ?hnliche Herausforderungen k?nnen durch virtuelle, randomisierte, kontrollierte Versuche angegangen werden, welche detaillierte und validierte stochastische (Monte-Carlo-) Simulationen verwenden. Virtuelle Versuche k?nnen umfassende Datenbanken generieren und die statistische Aussagekraft erreichen, die erforderlich ist, um den hochdimensionalen Raum der Verkehrsszenarien zu untersuchen, der für die Sicherheitsbewertung und die "Stresstests" von AVF erforderlich ist. Die Modellvalidit?t ist die entscheidende Voraussetzung für virtuelle Tests; daher zielt das vom BMVI gef?rderte Projekt SAVe, sowie das Folgeprojekt SAVeNoW darauf ab, einen "digitalen Zwilling" für das st?dtische Stra?ennetz in Ingolstadt, Deutschland, zu erstellen. Unser Forschungsteam konzentriert sich auf AVF-VRU-Interaktionen an st?dtischen Kreuzungen; diese Aufgabe erfordert validierte (sub)-mikroskopische Modelle für Dynamik, Kognition und Verhalten (oder gelegentliches "Fehlverhalten") der Verkehrsteilnehmer, einschlie?lich aller VRU-Kategorien. Als Anwendung wird derzeit das Potenzial für eine verbesserte Kreuzungssicherheit und Zuverl?ssigkeit von AVF durch Kommunikation mit externen Sensoren (V2X) und Datenfusion in virtuellen Versuchen getestet.
Problemstellung
- Wie k?nnen neue Technologien vor ihrer Einführung in den Verkehr objektiv auf ihre (Neben-)Wirkungen hin bewertet werden?
- Die Stichprobengr??e im Verkehr, um eine statistische Aussagekraft für die Leistungsbewertung des automatisierten und vernetzten Fahrens (AVF) zu erreichen, ist für Fahrstudien im Realverkehr viel zu gro?.
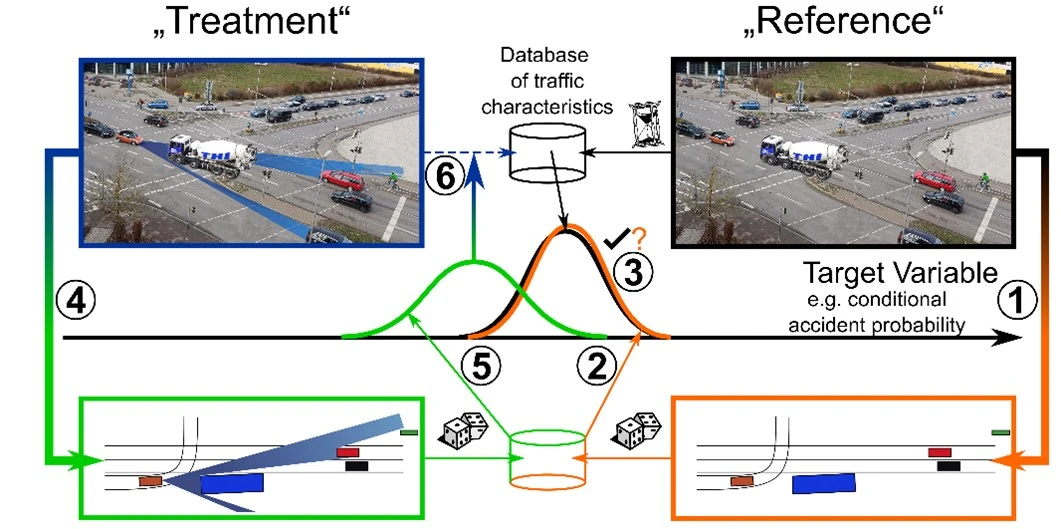
Unser Ansatz: Virtuelle Experimente
- Modellierung der aktuellen (stochastischen) Verkehrsprozesse als Referenz / Baseline.
- Generierung von synthetischen Verkehrsszenarien mittels stochastischer Simulation.
- Synthetisch erzeugte Verteilungen (beispielsweise Unfallzahlen) werden auf ?quivalenz zu realen Daten getestet.
- Integration von AVF-Simulationsmodellen mit quantifizierter Modellvertrauenswürdigkeit in das Verkehrsprozessmodell.
- Erzeugung einer hinreichend gro?en Stichprobe des ver?nderten Verkehrsprozesses mittels stochastischer Simulation mit integrierter AVF.
- Evaluierung der Leistungsf?higkeit der Ma?nahme im Vergleich zum Referenzverkehrsprozess.
Zentrale Herausforderung: Ursache-Wirkungs-Modelle für manuelle Verkehrsprozesse
- Verkehrsprozesse müssen unter Berücksichtigung stochastischer Variationen im kognitiven und dynamischen Verhalten aller Verkehrsteilnehmer (einschlie?lich Radfahrern, E-Scootern usw.) modelliert werden.
- Ungew?hnliche Kombinationen der zugrundeliegenden Verteilungen k?nnen zu Unf?llen führen und müssen daher realistisch modelliert werden, um validierte Bewertungen zu erstellen.
- Modell der Variationen des dynamischen Verhaltens von E-Scooter-Fahrern:
- Einbeziehung von Parametern wie F?higkeitsniveau, relevante kognitive und perzeptive Merkmale, Dynamik und physische Einschr?nkungen
- Modelle der menschlichen kognitiven F?higkeiten:
- Wichtige kausale Faktoren bei Verkehrsunf?llen
- Reduzierung der Problemkomplexit?t durch Modellierung nur der wichtigsten Fehlerprozesse, die zu Verkehrsunf?llen führen
Benefit
- Entwicklungsbegleitendes Werkzeug, das zur frühzeitigen Wirkungsanalyse von Technologien auf den Gesamtverkehrskontext eingesetzt werden kann.
- Reduzierung von Fehlentwicklungen aufgrund falsch eingesch?tzter (Neben-)Wirkungen im verkehrlichen Gesamtkontext.
- Kontinuierliches kosteneffizientes Feedback über die Leistungsf?higkeit von Technologien erm?glicht iterative Optimierung.
Aktuelle Projekte
SAVeNoW erforscht einen Digitalen Zwilling des urbanen Verkehrs am Beispiel von Ingolstadt, in dem relevante statische Elemente (wie z. B. Stra?en, Geb?ude, Verkehrs-Infrastruktur, Verkehrsregeln) und dynamische Entit?ten (z. B. Verkehrsteilnehmer) sowie Rahmenbedingungen (Tageszeit, Wetter) abgebildet werden. Mithilfe dieses Digitalen Zwillings werden Fragestellungen zur Verkehrseffizienz, -sicherheit, -?kologie und gesellschaftlicher Akzeptanz analysiert und durch L?sungsszenarien mit zugeh?rigen Ma?nahmen beantwortet. Das ?Gesamtwerkzeug“ funktioniert in zwei ineinandergreifenden Regelkreisen aus digitalem Testfeld (Reale Stadt) und seiner virtuellen Abbildung als Stadtmodell, welche die o. g. Dom?nen in Form von ?was-w?re-wenn“-Szenarien mit entsprechenden Ma?nahmen simuliert und die Ma?nahmenwirksamkeit bewertet und optimiert. Basis ist eine IT-technisch umgesetzte Gesamtarchitektur aus Datenerfassung, Prozessierung, Modellbildung, Simulation, Auswertung, Anwendung und Optimierung. Das Gesamtmodell, welches die Regelkreise in Funktion h?lt und weiterentwickelt, soll gesellschaftlich akzeptiert, betreibbar und wirtschaftlich sein.
Um in den kommenden Jahrzehnten Strategien für die Stra?enverkehrssicherheit zu entwickeln und die "Vision Zero" voranzutreiben, wird eine anerkannte und zuverl?ssige Methode für den Nutzen von Sicherheitsma?nahmen ben?tigt. Das Projekt V4Safety wird einen vorausschauenden Rahmen für diese Sicherheitsbewertung entwickeln. Ziel ist, eine Vielzahl von Sicherheitsma?nahmen berücksichtigen zu k?nnen, um sowohl den Beitrag und die Wirkung von Sicherheitstechnologien im Fahrzeug, als auch Infrastrukturl?sungen oder neue Verhaltensvorschriften a priori und vergleichend bewerten zu k?nnen.
Der avisierte Rahmen umfasst Methoden zur Projektion der Ergebnisse auf künftige Verkehrsszenarien und über EU-Regionen hinweg zur Verwendung durch politische Entscheidungstr?ger, Beh?rden und Verbraucherorganisationen.
V4Safety bemüht sich auch um die Vergleichbarkeit der Ergebnisse von Sicherheitsstudien, indem es nicht nur den Rahmen, sondern auch Leitlinien für dessen Anwendung bereitstellt. Die Leitlinien zeigen, wie relevante Mensch-, Fahrzeug- und Umweltmodelle auszuw?hlen, zu konfigurieren und zu verknüpfen sind und wie eine Projektion auf verschiedene Regionen in der EU durchzuführen ist. Darüber hinaus werden auch Projektionen für künftige Szenarien erm?glicht, welche Ver?nderungen im Mobilit?tssystem einbeziehen.
Abgeschlossene Projekte
Im Forschungsprojekt SAVe, Teilprojekt "Optimierung von Funktionen den automatisierten Fahrens (OF)" haben die antragstellenden THI Professoren Huber (Testmethoden/Wirksamkeitsanalyse), Botsch (Autonomes Fahren/KI-Methoden) und Facchi (Car2X-Systeme) den ersten Stein zur Erstellung einer prospektiven Wirkungsanalyse für den urbanen Verkehrsraum gesetzt. Das besonders unfalltr?chtige Szenario Linksabbiegen ohne Vorfahrt wurde für manuellen Verkehr (Referenz) unter Berücksichtigung stochastischer Variationen im Verhalten aller Verkehrsteilnehmer (inkl. Fu?g?nger, Radfahrer, E-Scooter) modelliert und in der eigens entwickelten Monte-Carlo Simulationsumgebung ?THIREKS“ implementiert. Als Behandlungsma?nahme wurde ein automatisiertes Fahrzeug modelliert und integriert. Die konservative Umfelderfassung rein mit Fahrzeug-interner Sensorik stellt allerdings im innerst?dtischen Verkehr durch potentielle Sichtverdeckungen ein Risiko für die Fahrfunktion dar. Daher wurde die Simulation der Umfelderfassung um ein ?berkopfsensormodell erweitert, um den Performancegewinn von Infrastrukturma?nahmen (Car2X) abzusch?tzen. In diesem Sinne stellt der ?berkopfsensor auch eine Ma?nahme dar, deren Wirksamkeit es zu bewerten gilt. Erkenntnisse wurden bereits auf internationalen Fachkonferenzen pr?sentiert und ver?ffentlicht.
Ver?ffentlichungen
- P. Brunner, F. Denk, R. Kates, W. Huber, K. Bogenberger, T. von dem Bussche "An E-Scooter Safety Experiment -Design, Methodolgy and Results", Transportation Research Board, Washington, USA, 2022
- P. Brunner, A. L?cken, F. Denk, R. Kates, W. Huber "Analysis of experimental data on dynamics and behavior of e-scooter riders and applications to the impact of automated driving functions on urban road safety", Intelligent Vehicles Conference, Las Vegas, USA, 2020
- F. Denk, W. Huber, P. Brunner, R. Kates "The role of perceptual failure and degrading processes in urban traffic accidents: a stochastic computational model for virtual experiments", International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020
- P. Brunner, F. Denk, W. Huber, R. Kates "Virtual safety performance assessment for automated driving in complex urban traffic scenarios", International Conference on Intelligent Transportation Systems (ITSC), Auckland, New Zealand, 2019




