Seit 15 Jahren verfolgt der Deutsche Verkehrssicherheitsrat e. V. gemeinsam mit 25 weiteren europ?ischen L?ndern ein ehrgeiziges Vorhaben im europ?ischen Stra?enverkehr: die Vision Zero. Ziel ist es, die Anzahl der Toten und Schwerverletzten im Stra?enverkehr bis zum Jahr 2050 auf null zu reduzieren. Gro?es Potential steckt dabei in der Automatisierung des Fahrens, wie Notbremsassistenten bereits gezeigt haben. Auf diese Weise konnte bereits eine Vielzahl an Verkehrsunf?llen verhindert werden. Dennoch k?nnen Unf?lle trotz steigendem Automatisierungslevel nicht vermieden werden, etwa bei verdeckten Objekten oder gest?rten Umfeldsensoren. Um in solchen Situationen den bestm?glichen Schutz aller Verkehrsteilnehmer sicherstellen zu k?nnen, sollen zukünftig Pre-Crash Systeme zum Einsatz kommen. Diese Systeme aktivieren Schutzsysteme, wie beispielsweise Airbags zum Schutz der Fahrzeuginsassen, bereits Millisekunden bevor der Unfall passiert. Von Bedeutung ist es, Fehlausl?sung unbedingt zu vermeiden. F?lschlicherweise ausgel?ste Airbags k?nnten die Insassen verletzen und auch dazu führen, dass der Fahrer die Kontrolle über das Fahrzeug verliert und aus einer eigentlich ungef?hrlichen Situation eine lebensbedrohliche Lage entsteht. Mit Hilfe einer Trajektorien- und Unfallschweresch?tzung, basierend auf der Umfeldwahrnehmung der vorausschauenden Sensorik, kann pr?diziert werden, ob und wann ein Unfall stattfinden und wie schwer dieser sein wird. Damit lassen sich durch eine frühzeitige Aktivierung von Schutzsystemen Unfallfolgen mindern. Zu diesem Zweck forschen die Mitarbeiter des Instituts C-ISAFE an Methoden, mit denen die Unfallkonstellation einschlie?lich der Unfallschwere auf die Insassen approximiert werden kann. Mit Hilfe von sowohl physikalischen als auch KI-basierten Methoden pr?dizieren die Forscherinnen und Forscher unfallrelevante Parameter wie die Kollisionsgeschwindigkeit und leiten daraus die Belastungen auf den Kopf oder Oberk?rper der verunfallten Personen ab. Die so entwickelten Methoden werden anschlie?end mit realen Crashversuchen in der C-ISAFE eigenen Versuchshalle verifiziert.
Unvermeidbarkeit von Kollisionen & Schwere eines Unfalls

Pr?diktion der Crashkonstellation
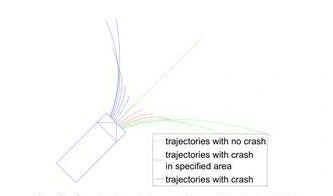
Die Detektion der Unvermeidbarkeit von Unf?llen in kritischen Verkehrssituationen ist ein Schlüsselelement für integrale Fahrzeugsicherheits- und Pre-Crash Systeme. Für Fahrzeuge und Objekte, mit denen es zu einer Kollision kommen kann, werden Bewegungshypothesen aufgestellt, die auf physikalischen Bewegungsmodellen basieren und mit den Objektinformationen, z. B. Position und Geschwindigkeit, aus dem Umfeldmodell der Sensoren parametriert werden. Alle Kombinationen der so errechneten, physikalisch m?glichen Bewegungstrajektorien für m?gliche Kollisionsobjekte und das Egofahrzeug werden auf Kollisionsereignisse analysiert. So k?nnen Unf?lle bereits einige Zehntelsekunden vor der eigentlichen Kollision als unvermeidbar erkannt werden.
Das Institut C-ISAFE besch?ftigt sich gezielt mit der Frage, wie die Unvermeidbarkeit einer Kollision zuverl?ssig und m?glichst früh erkannt werden kann und welche Einflussfaktoren auf die Pr?diktionsgenauigkeit existieren. Dazu werden m?gliche Bewegungstrajektorien für alle Objekte modelliert, sodass die tats?chliche Bewegung sowie m?gliche unfallvermeidende Ausweichbewegungen bestm?glich pr?diziert werden. Da Fehlausl?sungen von irreversiblen Elementen der Passiven Sicherheit unbedingt zu vermeiden sind, bestehen hier starke Anforderungen an eine valide und robuste Detektion der Unvermeidbarkeit und Pr?diktion der Unfallkonstellation. Dabei stellen die zur Verfügung stehenden Informationen aus der Sensorik aufgrund von Messungenauigkeiten, limitierten Abtastraten und der geringen verfügbaren Zeit vor der Kollision zus?tzliche Herausforderungen dar.
Crashschweresch?tzung

Um die Sicherheit beim autonomen Fahren auf das n?chste Level zu heben, ist eine Aktivierung von irreversiblen Sicherheitssystemen wenige Millisekunden vor dem Unfall unabdingbar. Ausschlaggebend hierfür ist die zu erwartende Schwere des Unfalls. Sie kann entweder mit der Belastung auf den menschlichen K?rper oder kinematischen Parametern wie der durchschnittlichen Beschleunigung w?hrend des Unfalls erfolgen. Hierbei erfüllt die vorausschauende Sch?tzung der Crashschwere zwei fundamentale Funktionen.
Auf der einen Seite entscheidet sie, ob in dem bevorstehenden Crashevent Airbags ben?tigt werden. Das Ausl?sen von irreversiblen Rückhaltemitteln in der Pre-Crash Phase ist mit einem hohen Risiko behaftet, da das Fahrzeug unkontrollierbar werden kann. Infolgedessen kann eine Fehlausl?sung zu schweren Verletzungen der Insassen führen und muss daher m?glichst vermieden werden. Dies geht nur mit einer vorherigen Absch?tzung der Crashschwere.
Auf der anderen Seite muss bei einer Ausl?sung auch der genaue Zündzeitpunkt des Airbags festgelegt werden, um die h?chste Schutzwirkung für den Insassen zu gew?hrleisten. Sowohl konventionelle als auch zukünftige Airbagsysteme ben?tigen aus diesem Grund Methoden, mit denen der Zündzeitpunkt vorausschauend auf das detektierte Crashszenario angepasst werden kann. Da der Zeitpunkt neben dem Szenario auch wesentlich von der Schwere abh?ngt, ist auch hier eine Sch?tzung unabdingbar.
Daher forscht C-ISAFE an physikalischen und KI-gestützten Methoden, die eine zuverl?ssige und robuste Unfallschweresch?tzung auf Basis der Umfeldsensordaten erm?glicht und gleichzeitig die Bedingungen für Pre-Crash Anwendungen erfüllt. Diese Algorithmen werden anhand echter Crashtestdaten validiert.
Kontaktbasierter Validierungssensor

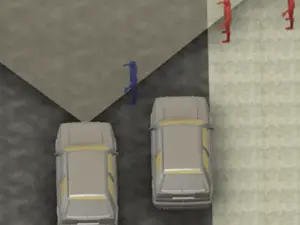
Einer der wichtigsten Schritte zur Aktivierung jeder Aktorik für Fahrzeugsicherheitssysteme basierend auf vorausschauender Sensorik ist eine robuste Validierung. Ein Zwischenziel auf dem Weg zur vollst?ndig vorausschauenden Airbagaktivierung ist eine kontaktbasierte Validierung zum Kontaktzeitpunkt t0. Dieser Zwischenschritt gew?hrleistet zudem einen reibungslosen ?bergang zur Aktivierung von Sicherheitsaktoren vor t0.
Eine kontaktbasierte Validierung gibt dem System Stabilit?t gegenüber St?reinflüssen durch beispielsweise Witterung. Zus?tzlich kann eine Falschausl?sung aufgrund anderer Sensorproblematiken vermieden werden. Leichte und weiche Objekte mit einem gro?en Radarquerschnitt k?nnen etwa ein rein radar-basiertes System t?uschen, eine Fehlausl?sung wird aber durch die nachfolgende Validierung abgefangen. So k?nnen Sch?den an den Insassen und anderen Verkehrsteilnehmern durch Fehlausl?sungen von passiven Rückhaltemitteln vermieden werden. Darüber hinaus k?nnen Informationen aus dem Validierungssensor extrahiert werden, um das Sicherheitslevel weiter zu steigern. Kurz nach t0 misst der Validierungssensor die Position und ?berdeckung des Aufpralls. Diese Werte werden daraufhin mit den Pr?diktionen aus den vorausschauenden Sensorsystemen verglichen und validieren auf diese Weise die Umfeldsensoren.


Ausgew?hlte Publikationen
- A.-L. Schlamp, K. Schneider, R. Lugner, G. J. Sequeira, and T. Brandmeier, “Approximation of the overlap for integral safety systems,” in Fahrzeugsicherheit: Auf dem Weg zur Fahrzeugsicherheit 2030, 2022, pp. 407-418, doi: 10.51202/9783181023877-407.
- R. Krause, R. Lugner, M. Inderst, K. Schneider, G. J. Sequeira, and T. Brandmeier, "Interface and Optimizations for Crash Severity Estimation and Inevitability Modelling in Pre-Crash Safety Systems," in Proceedings of the FISITA 2021 World Congress, 2021.
- G. J. Sequeira, R. Lugner, T. Brandmeier, E. Elnagdy, G. Danapal, and U. Jumar, “Investigation of Different Classification Algorithms for Predicting Occupant Injury Criterion to Decide the Required Restraint Strategy,” in 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021 Indianapolis, IN, USA, pp. 204-210, doi: 10.1109/ITSC48978.2021.9564868.
- K. Schneider, R. Lugner, M. Inderst, T. Weigl, and T. Brandmeier, “Verification of Crash Severity Estimation Algorithm for Autonomous Driving Using Real Crash Data,” in Proceedings of the 2020 4th International Conference on Vision, Image and Signal Processing (ICVISP 2020), Bangkok, Thailand, 2021, pp. 1-6, doi: 10.1145/3448823.3448850.
- G. J. Sequeira, A. Patel, S. Afraj, R. Lugner, and T. Brandmeier, “FEM-based Methodology for Crash Severity Estimation in Frontal Crash Scenarios,” IOP Conference Series: Materials Science and Engineering, vol. 2020, no. 831, 2020, The 7th International Conference on Mechanical, Automotive and Materials Engineering 8-10 December, Melbourne, Australia, doi: 10.1088/1757-899X/831/1/012019.
- K. Schneider, M. Inderst, and T. Brandmeier, “Hybrid Model Based Pre-Crash Severity Estimation for Automated Driving,” in 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 2020, pp. 1-6, doi: 10.1109/CAVS51000.2020.9334670.
- R. Lugner, D. Vriesman, M. Inderst, G. J. Sequeira, N. Pasupuleti, A. Zimmer, and T. Brandmeier, “Evaluation of Sensor Tolerances and Inevitability for Pre-Crash Safety Systems in Real Case Scenarios,” in 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 2020, pp. 1-6, doi: 10.1109/CAVS51000.2020.9334578.
- R. Lugner, M. Inderst, G. J. Sequeira, K. Schneider, and T. Brandmeier, “Collision Prediction for Irreversible Pre-Crash Safety Measures,” in FISITA Web Congress 2020.
- D. Steinhauser, P. HeId, A. Kamann, A. Koch, and T. Brandmeier, "Micro-Doppler Extraction of Pedestrian Limbs for High Resolution Automotive Radar," in 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019, pp. 764-769, doi: 10.1109/IVS.2019.8813850.
- K. Schneider, et. al., “Crash severity estimation in oblique crashes for integrated safety systems,” in Proceedings of the 5th International Symposium on Future Active Safety Technology toward Zero Accidents (FAST-zero’19), Blacksburg, Virgina, USA, doi: 10.1243/09544070D14904.
- G. J. Sequeira, R. Lugner, U. Jumar, and T. Brandmeier, “A validation sensor based on carbon-fiber-reinforced plastic for early activation of automotive occupant restraint systems,” Journal of Sensors and Sensor Systems, vol. 8, pp. 19-35, doi: 10.5194/jsss-8-19-2019.
- P. Held, D. Steinhauser, A. Kamann, T. Holdgrün, I. Doric, A. Koch, and T. Brandmeier, “Radar-Based Analysis of Pedestrian Micro-Doppler Signatures Using Motion Capture Sensors,” in 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 2018, pp. 787-793, doi: 10.1109/IVS.2018.8500656.
Ansprechpartner

Prof. Dr.-Ing. Thomas Brandmeier
Tel.: +49 841 9348-3840
Raum: H023
E-Mail: Thomas.Brandmeier@thi.de

Robert Lugner, M.Sc.
Tel.: +49 841 9348-3340
Raum: H024
E-Mail: Robert.Lugner@carissma.eu




